学术中心
基于视觉的作物行检测方法综述:以农田地面自主导航作业为重点
发布时间:
2024-06-28
来源:
作者:
作物行检测技术广泛应用于田间管理作业、作物表型分析等领域。作物行检测方法通过相对定位从田间道路获取引导信息。该方法可以有效缓解GNSS制导等绝对定位方法的约束,最终提高农业装备的自主定位能力和导航精度。研究人员广泛探索了快速、准确、可靠地识别田间环境中作物行取向特征的方法。因此,基于视觉技术建立了许多算法和模型。本文的主要目的是全面概述作物行检测方法的现状,特别强调在田间地面自主导航操作中使用的幼苗作物视觉感知技术。详细总结了作物行检测方法的典型过程,包括作物图像数据采集、作物冠层特征提取和作物行中心线检测。分析了各工序的代表性装置、模型和算法。讨论了作物行检测所面临的挑战和现有研究方法的局限性。提出了未来的研究方向和可能的解决方案。
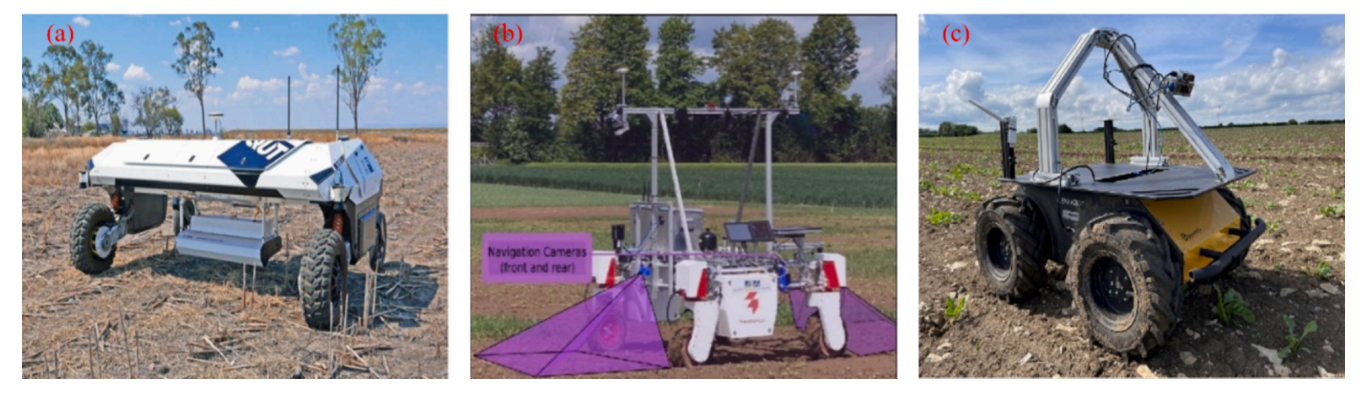 图1 典型的基于视觉的导航设备。(a) AgBotII除草机器人;(b) BonnBot-I机器人;(c)哈士奇机器人。
图1 典型的基于视觉的导航设备。(a) AgBotII除草机器人;(b) BonnBot-I机器人;(c)哈士奇机器人。
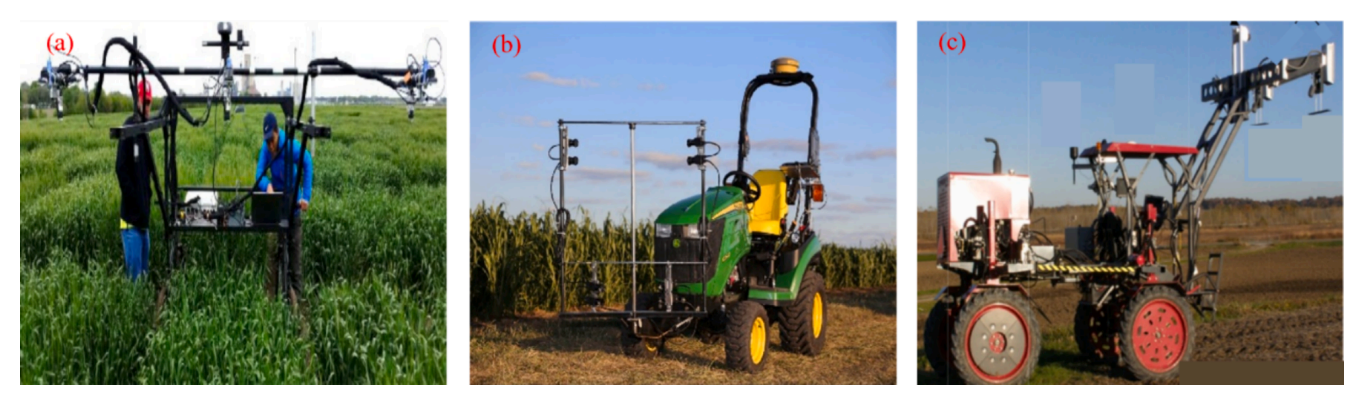 图2 典型作物表型采集平台。(a)安装用于高通量现场表型的多传感器系统的平台;(b)车载植物表型平台;(c) Rover表型平台。
图2 典型作物表型采集平台。(a)安装用于高通量现场表型的多传感器系统的平台;(b)车载植物表型平台;(c) Rover表型平台。
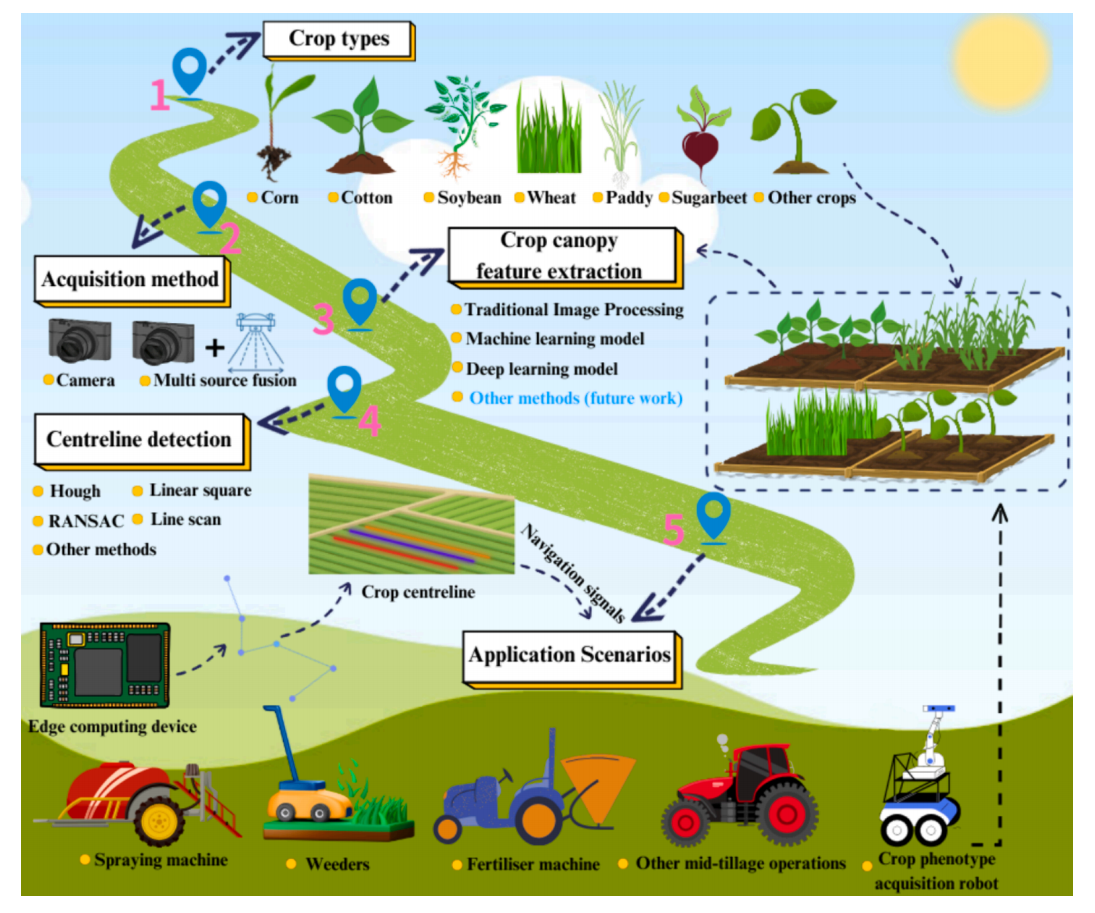 图3 总体实现路线从获取作物图像数据到设计作物行检测算法,最终为农业设备提供导航定位参数。
图3 总体实现路线从获取作物图像数据到设计作物行检测算法,最终为农业设备提供导航定位参数。
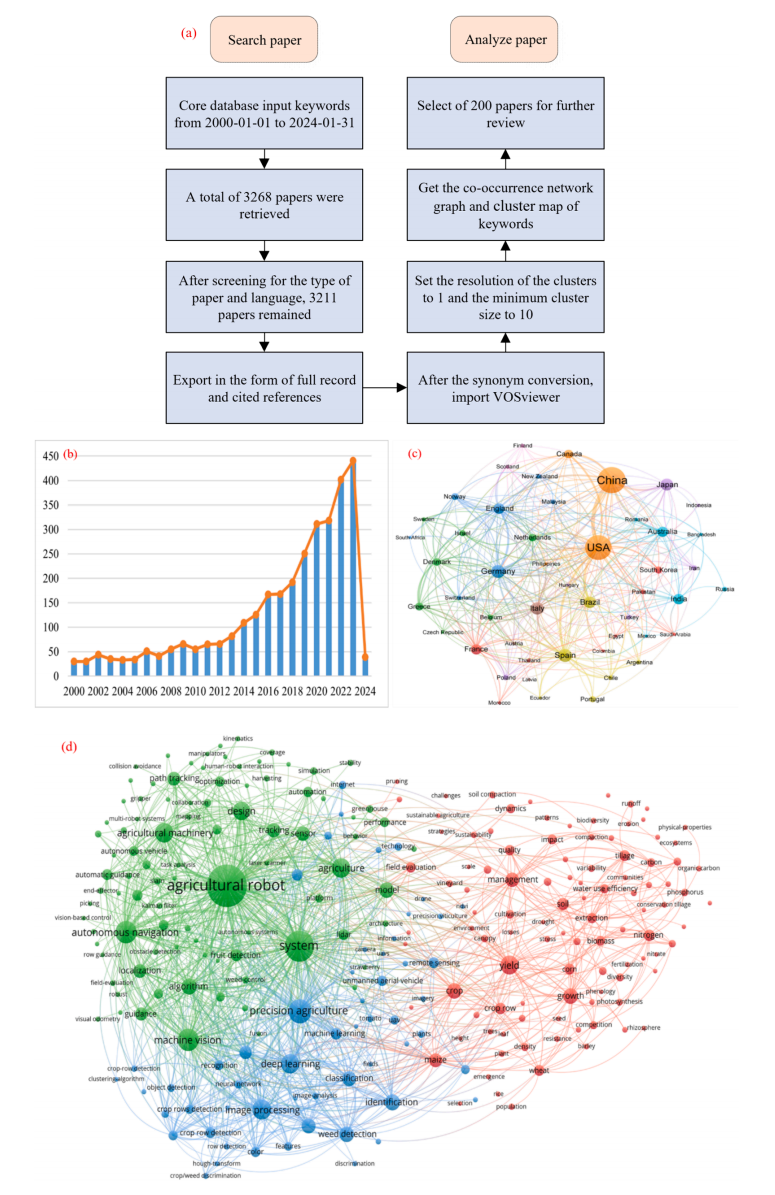
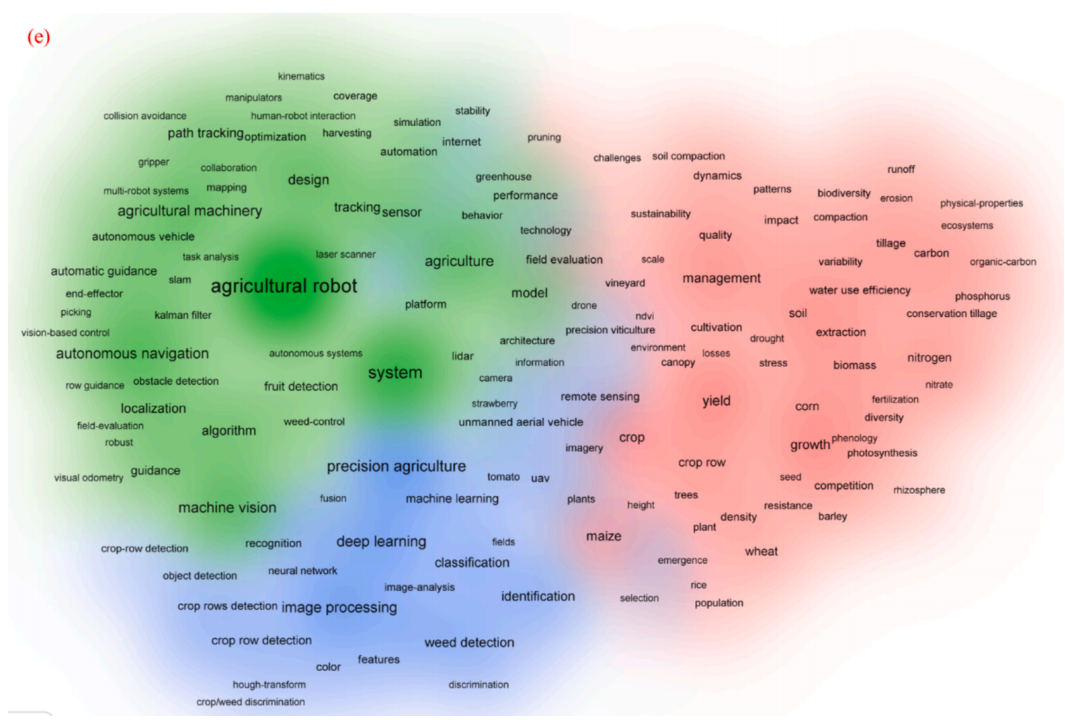
图4 2000年1月1日至2024年1月31日关键词相关研究及论文统计汇总。(a)文献筛选流程图;(b) 2000年1月1日至2024年1月31日每年对应的相关文献数量统计;(c)作者国家共现图;(d)关键词协同网络;(e)关键字集群视图。
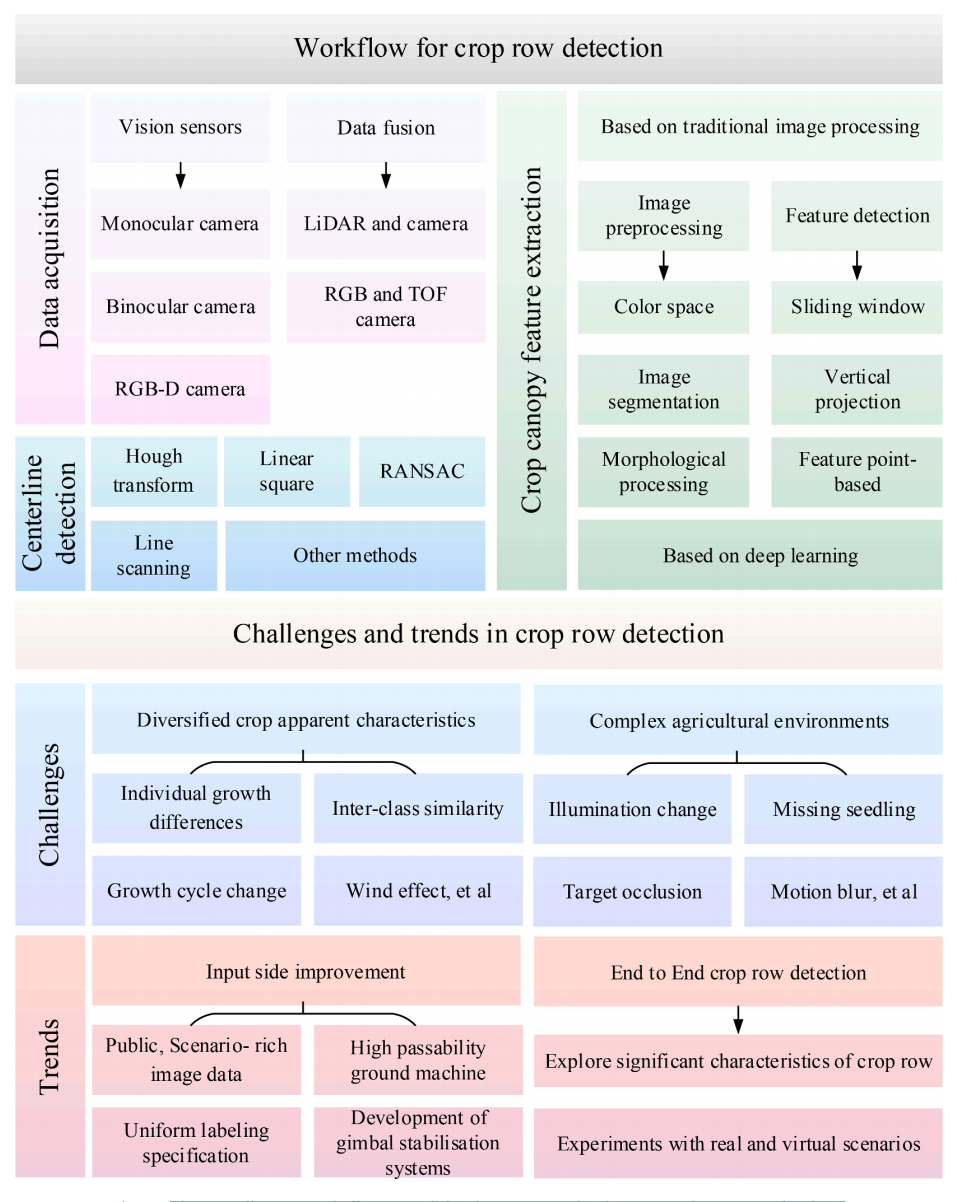 图5 作物行检测技术的总体过程、挑战和发展趋势。
图5 作物行检测技术的总体过程、挑战和发展趋势。
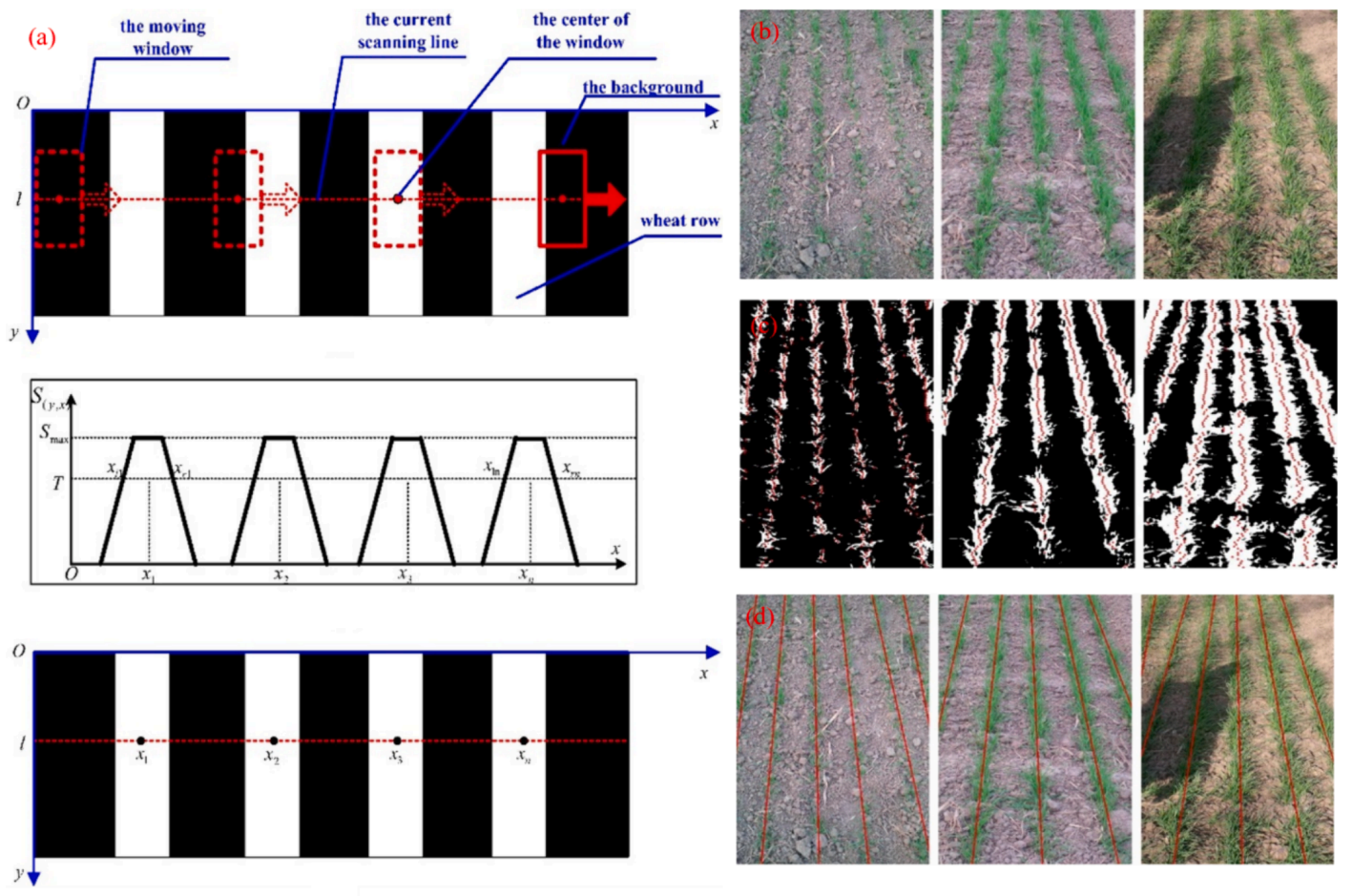 图6 改进的滑动窗口方法提取特征点。(a)当前水平扫描线上提取特征点示意图;(b)原始作物图像;(c)不同k值(k为可调参数)下的特征点提取结果。在图(c)中,从左到右对应的k分别为0.2、0.8、0.8;(d)小麦作物行中心线检测结果。
图6 改进的滑动窗口方法提取特征点。(a)当前水平扫描线上提取特征点示意图;(b)原始作物图像;(c)不同k值(k为可调参数)下的特征点提取结果。在图(c)中,从左到右对应的k分别为0.2、0.8、0.8;(d)小麦作物行中心线检测结果。
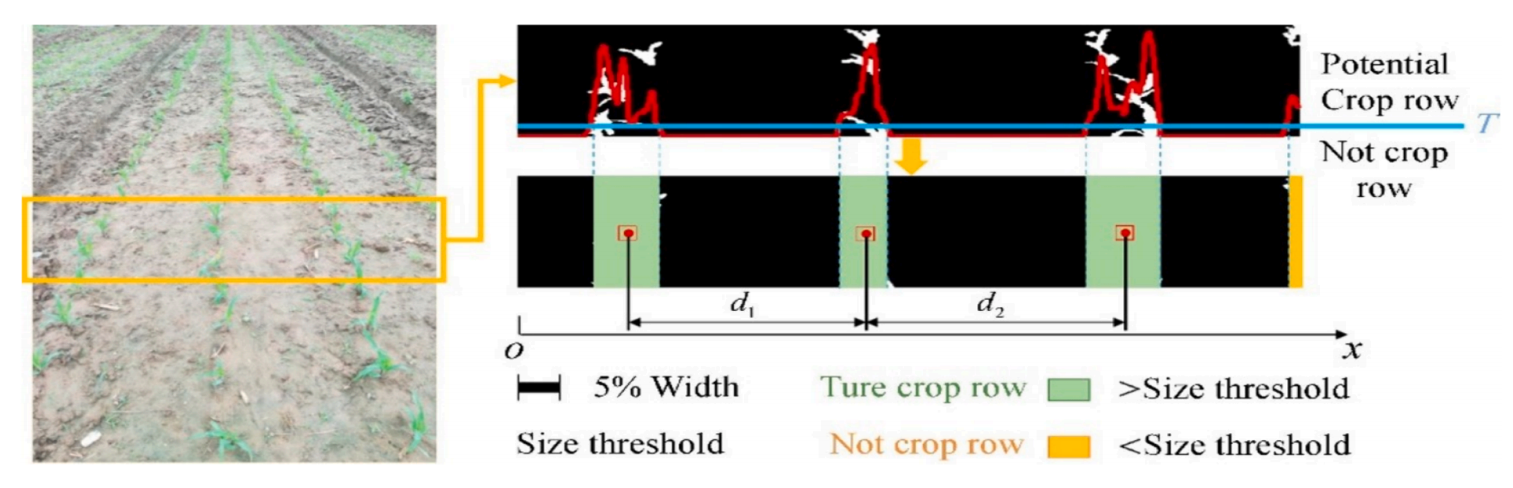 图7 采用垂直投影法确定作物行左右边界并提取中心点原理图。
图7 采用垂直投影法确定作物行左右边界并提取中心点原理图。
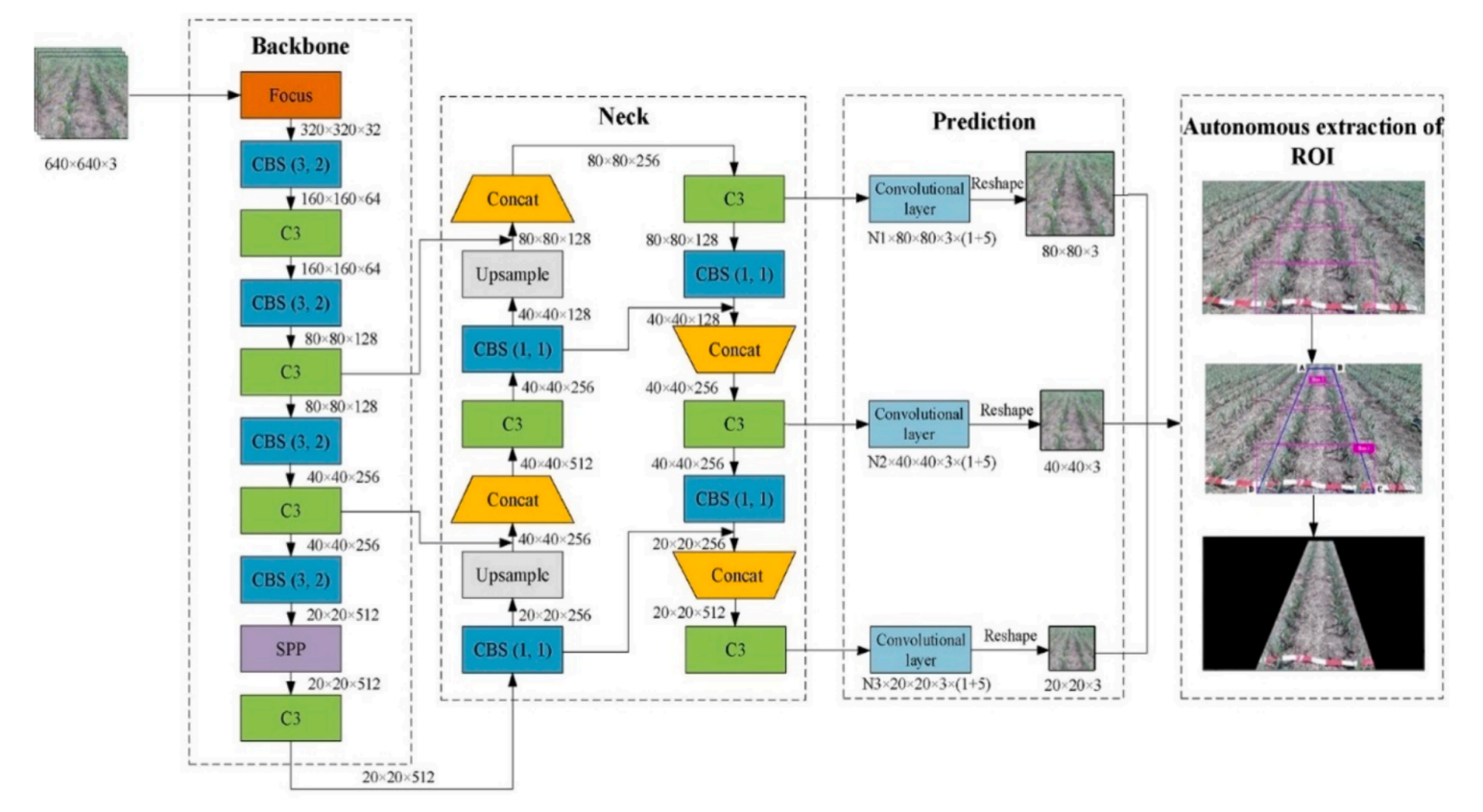 图8 基于Yolov5网络模型的玉米作物检测。
图8 基于Yolov5网络模型的玉米作物检测。
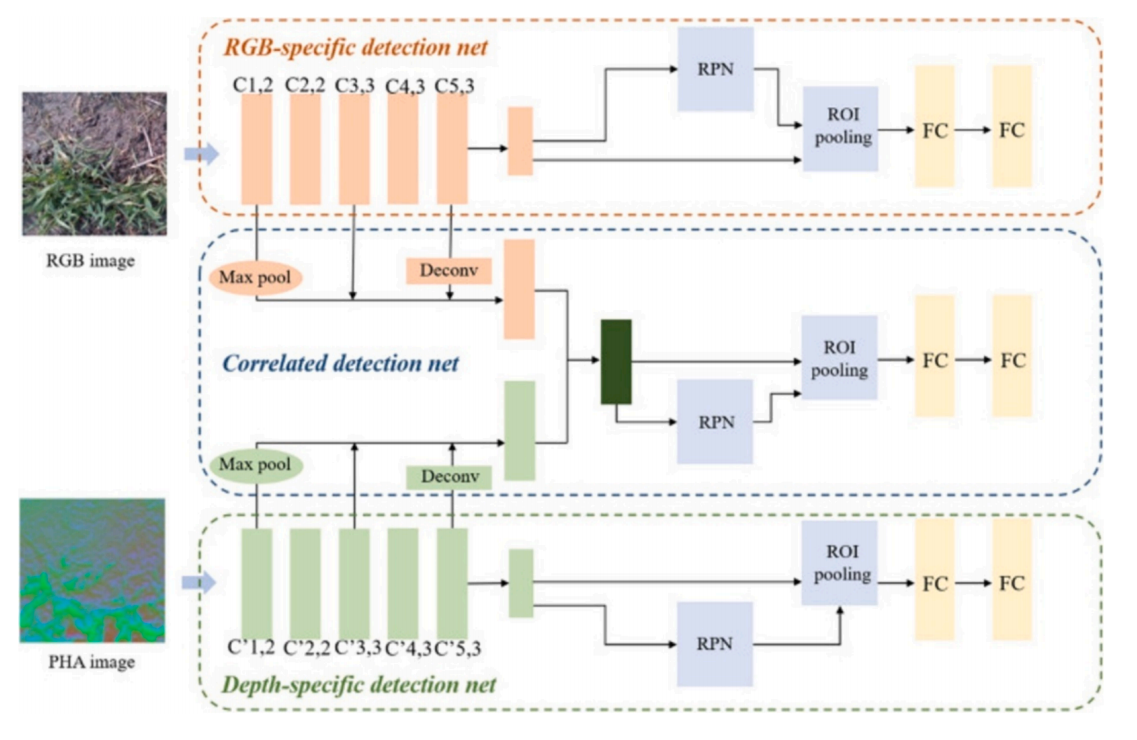 图9 RGB图像与Depth图像多模态融合的网络结构。
图9 RGB图像与Depth图像多模态融合的网络结构。
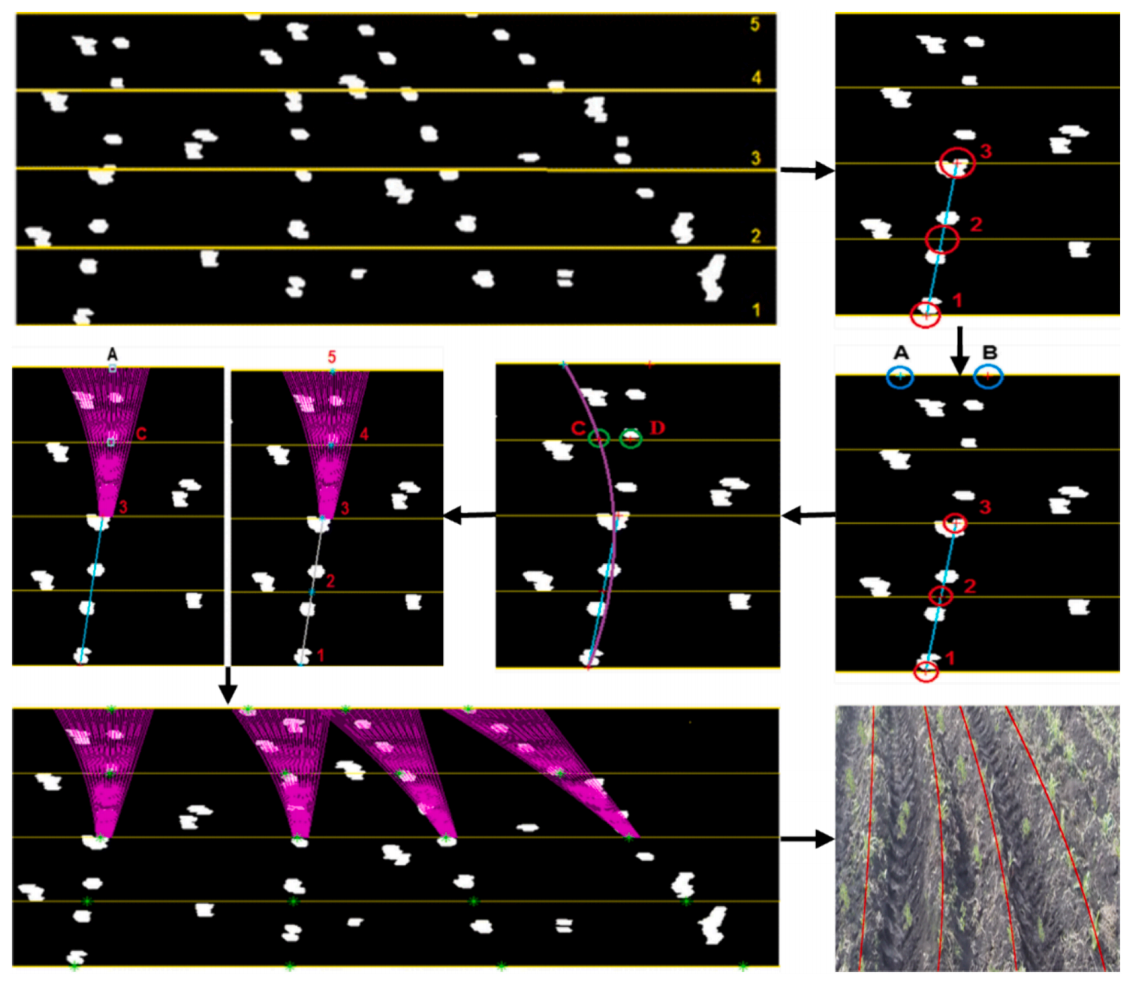 图10 行扫描确定玉米行线。
图10 行扫描确定玉米行线。
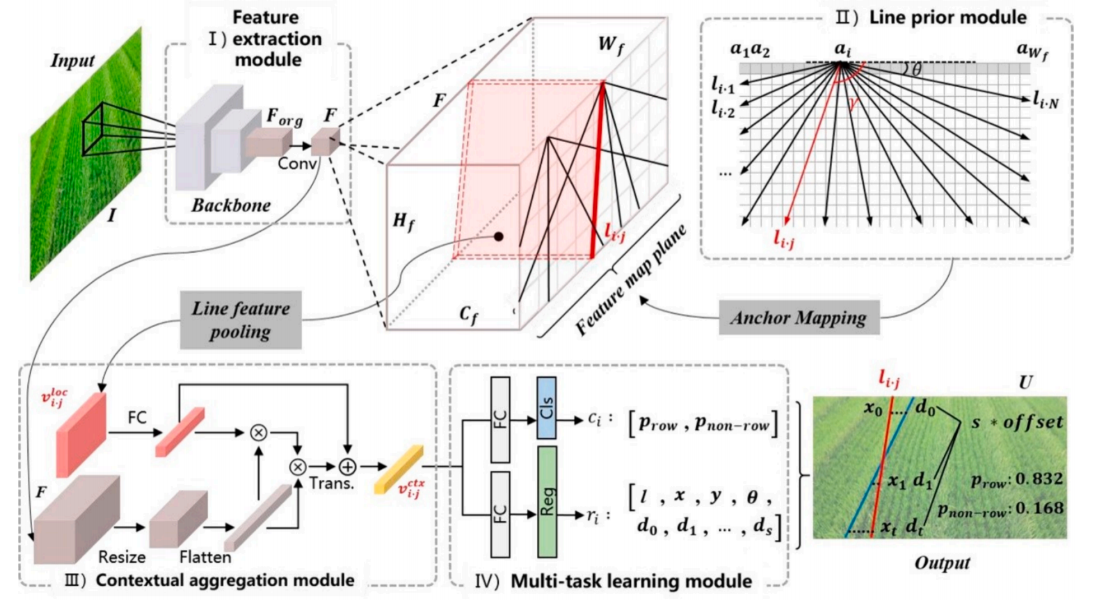 图11 端到端作物行检测网络−E2CropDet。
图11 端到端作物行检测网络−E2CropDet。
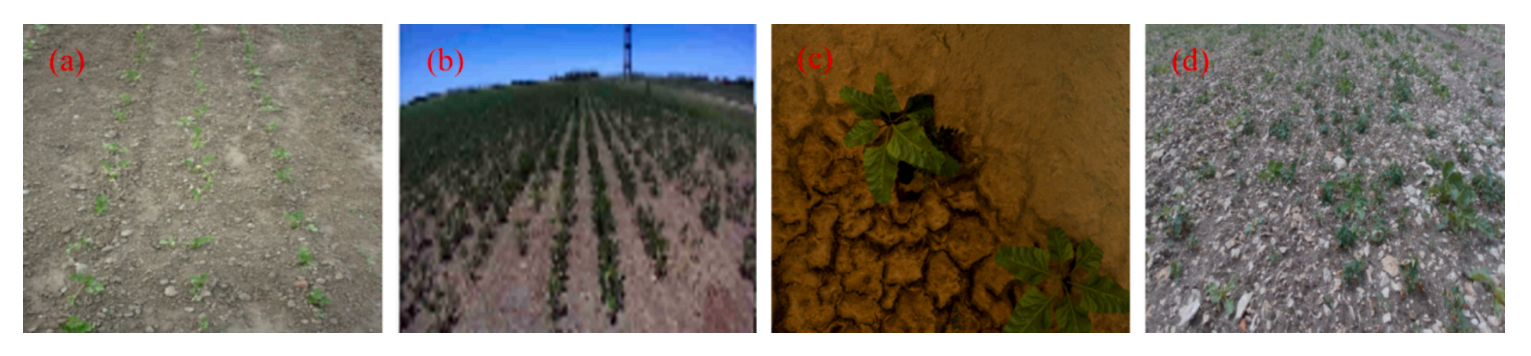 图12 数据集. (a) CRBD dataset;(b) Rosario dataset;(c) Flourish dataset;(d) CRDLD dataset.
图12 数据集. (a) CRBD dataset;(b) Rosario dataset;(c) Flourish dataset;(d) CRDLD dataset.
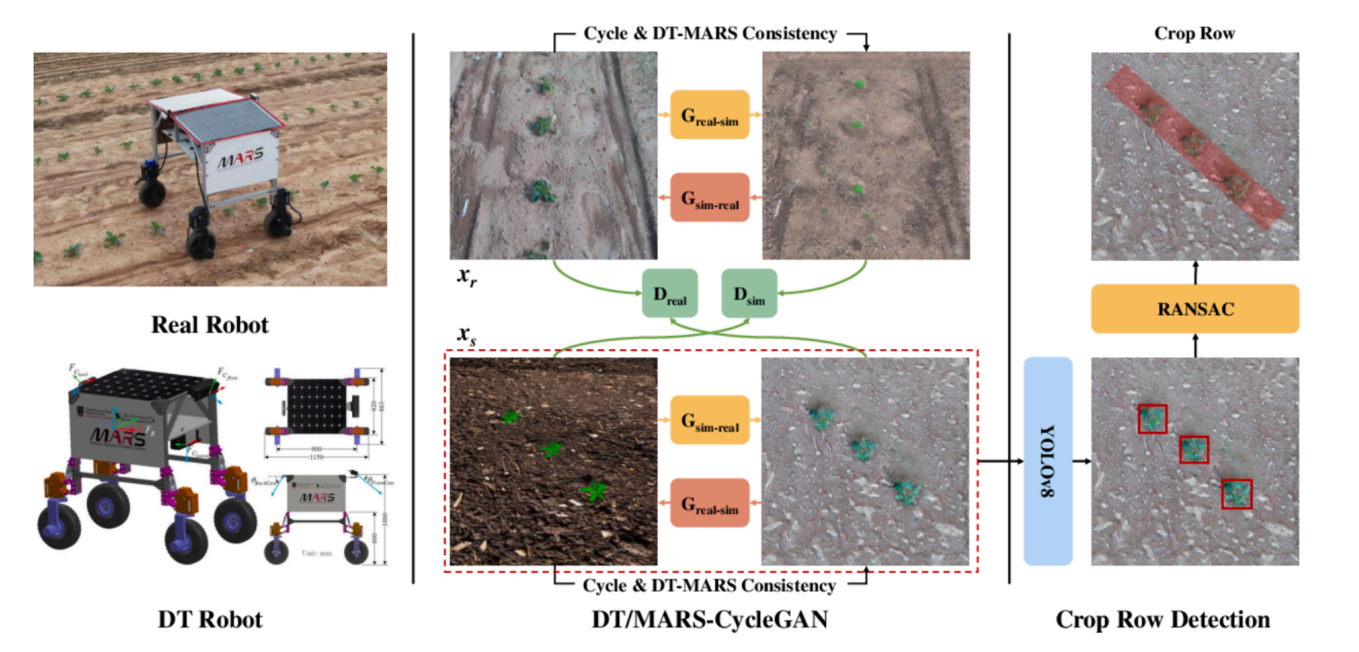 图13 结合生成式CycleGAN模型和数字孪生空间仿真方法,提高探测性能。
图13 结合生成式CycleGAN模型和数字孪生空间仿真方法,提高探测性能。
Shuo Zhang, Yu Liu, Kun Xiong, Yonghao Tian, Yuefeng Du, Zhongxiang Zhu, Mingwei Du, Zhiqiang Zhai, (2024) A review of vision-based crop row detection method: Focusing on field ground autonomous navigation operations, Computers and Electronics in Agriculture, 222, 109086,.
编辑
王春颖
推荐新闻

视频展示
联系我们
江南平台app体育
地址:北京市海淀区西三旗街道建材城中路12号院8号楼2门
电话:010-62925490、82928854、82928864、82928874、18600875228
传真:010-62925490-802
Email: info@phenotrait.com
邮编:100096
在线留言
关注我们
植物表型圈
植物表型资讯