基于无人车表型平台的三维多光谱点云解译植物性状空间异质性方法
发布时间:
2024-10-28
来源:
作者:
融合三维(three-dimensional,3D)和多光谱(multispectral,MS)成像数据有望实现高通量,全面的植物表型,以破译基因组-表型知识。由于具有复杂冠层结构的植物三维多光谱点云数据质量差,且辐射定标方法有限,获取高质量的植物三维多光谱点云(3DMPCs)仍然具有挑战性。本文提出了一种新颖的三维空间-光谱数据融合方法,通过整合用于自适应数据采集的下一个最佳视角(NBV)规划和用于辐射校准的神经参考场(NeREF),生成高质量的植物三维多光谱点云(3DMPCs)。利用该方法获取了紫苏、番茄和油菜籽等植物的3DMPCs,并通过叶绿素含量和等效水厚(equivalent water thickness,EWT)估算的精度进行了评价。结果表明,采用该方法采集的植物点云的完整性比单独使用固定视点平均提高23.6%。基于NeREF的半球形参考辐射定标方法可将提取的反射光谱的均方根误差(RMSE)降低58.93%,优于传统的定标方法。利用所生成的3DMPCs进行偏最小二乘回归(PLSR),叶绿素含量和EWT预测的RMSE分别降低了21.25%和14.13%。本研究为在自然光条件下采集高质量植物3DMPCs提供了一种有效、高效的方法,提高了植物形态和生理性状表型的准确性和全面性,为植物生物学和遗传学研究及育种规划提供了便利。
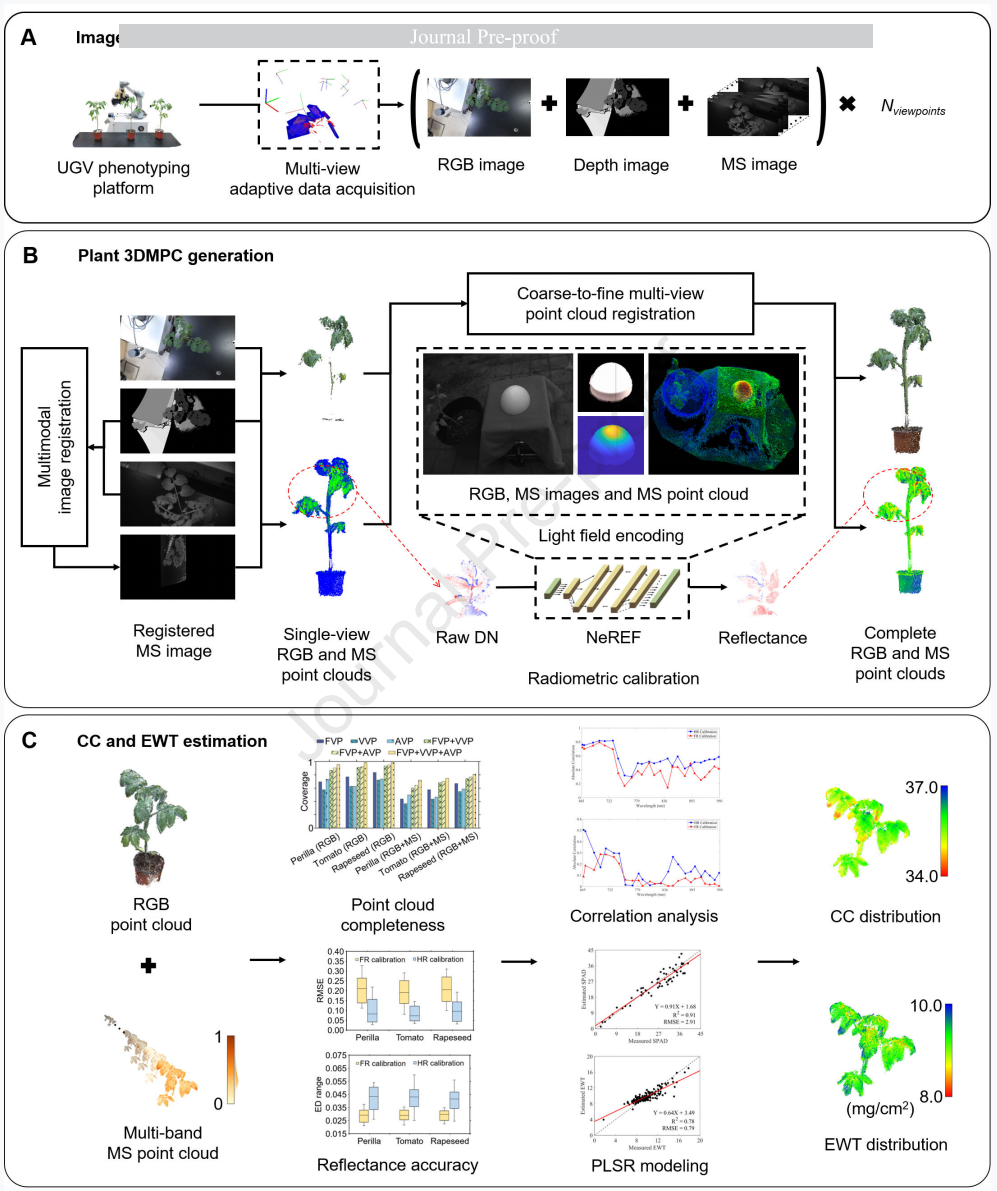 图1 基于植物三维多光谱点云的整个表型分析示意图。
图1 基于植物三维多光谱点云的整个表型分析示意图。
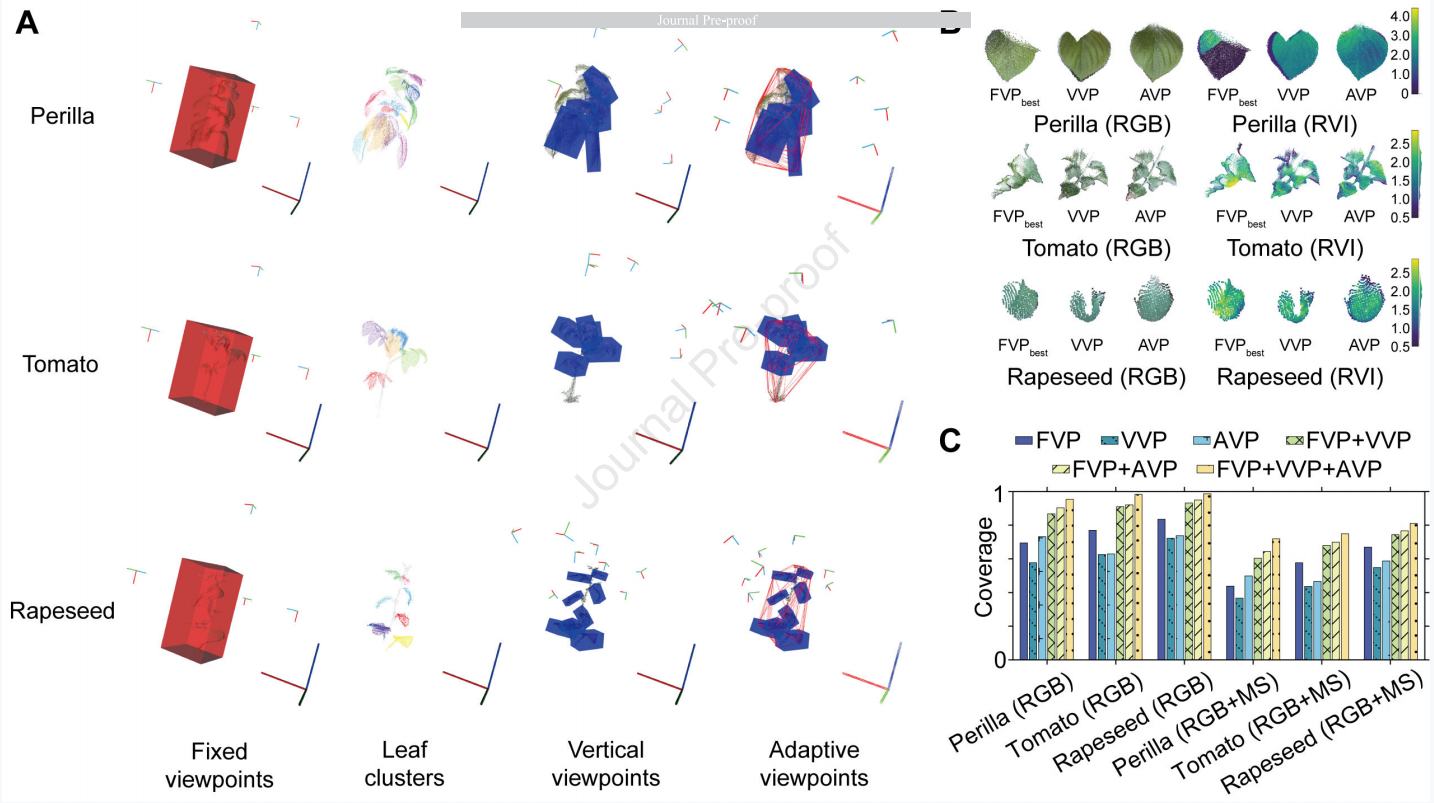 图2 每个步骤的下一个最优视图(NBV)估计结果和点云完整性评估结果的说明。
图2 每个步骤的下一个最优视图(NBV)估计结果和点云完整性评估结果的说明。
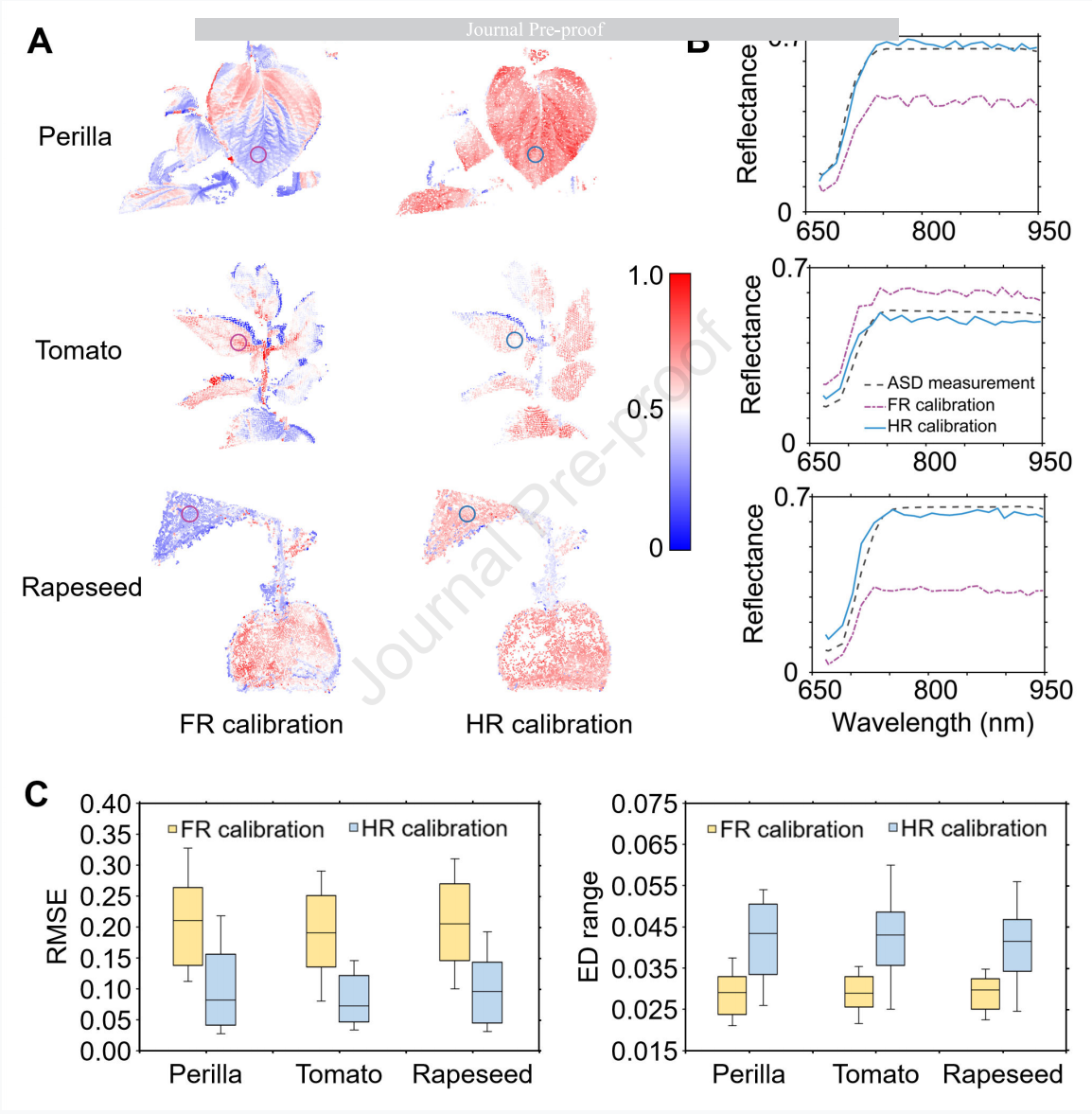 图3 辐射定标的定性和定量结果。
图3 辐射定标的定性和定量结果。
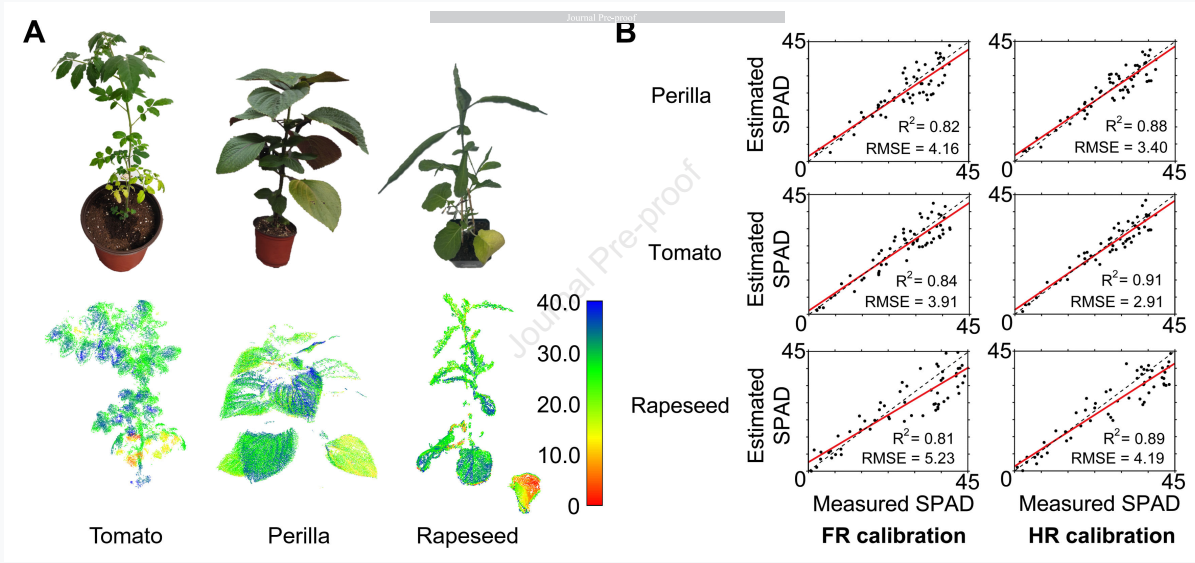 图4 基于三维多光谱点云(3DMPCs)的全株SPAD分布可视化及精度研究。
图4 基于三维多光谱点云(3DMPCs)的全株SPAD分布可视化及精度研究。
 图5 基于三维多光谱点云(3DMPCs)的全株等效水厚(EWT)分布的可视化与精度研究。
图5 基于三维多光谱点云(3DMPCs)的全株等效水厚(EWT)分布的可视化与精度研究。
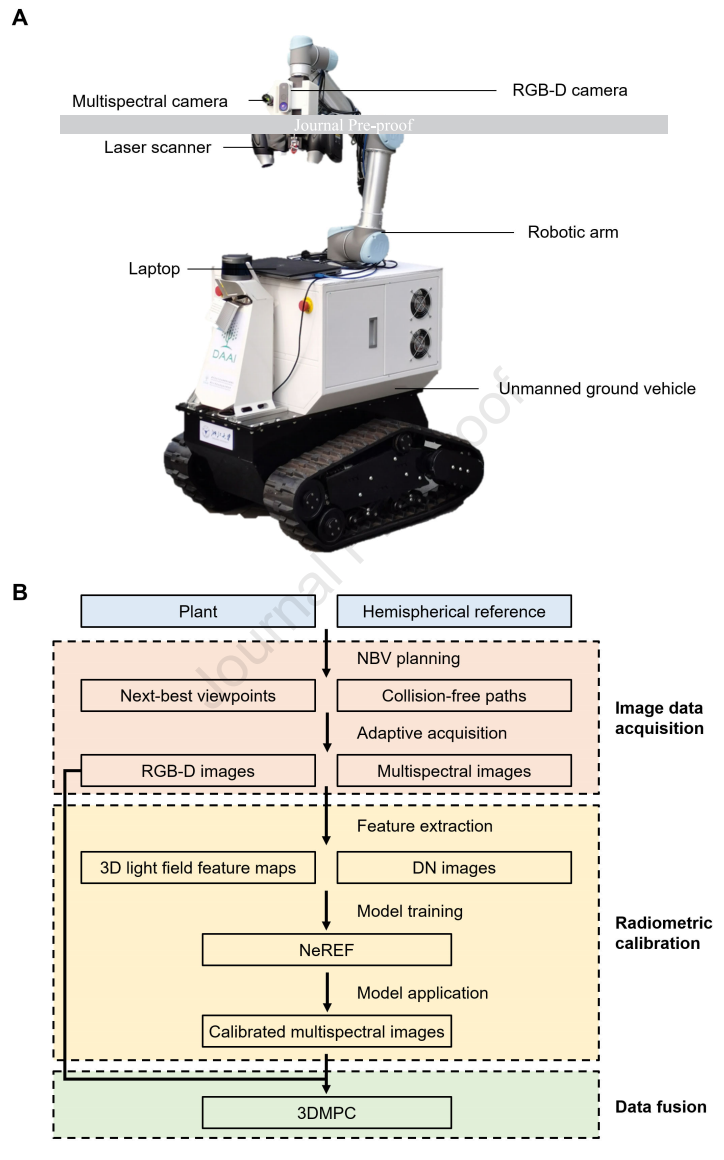 图6 高质量植物三维多光谱点云生成系统与方法。
图6 高质量植物三维多光谱点云生成系统与方法。
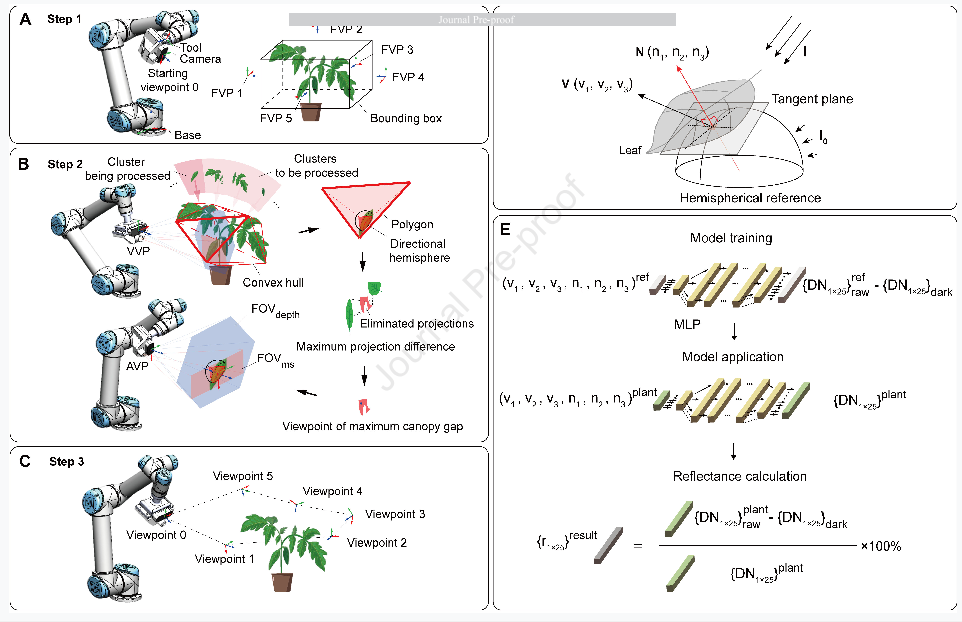 图7 自适应数据采集和神经参考场(NeREF)构建方法。
图7 自适应数据采集和神经参考场(NeREF)构建方法。
Xie P., Ma Z., Du R., Yang X., Jiang Y., and Cen H. (2024). An unmanned ground vehicle phenotyping-based method to generate three-dimensional multispectral point clouds for deciphering spatial heterogeneity in plant traits. Mol. Plant.
编辑
王春颖
推荐新闻

视频展示
联系我们
江南平台app体育
地址:北京市海淀区西三旗街道建材城中路12号院8号楼2门
电话:010-62925490、82928854、82928864、82928874、18600875228
传真:010-62925490-802
Email: info@phenotrait.com
邮编:100096
在线留言
关注我们
植物表型圈
植物表型资讯