空中与地面机器人系统相结合的农田作物叶位自动检测
发布时间:
2024-11-03
来源:
作者:
机器人系统对可持续作物生产至关重要。无人机虽常用于监测农田,但早期检测植物疾病或营养缺乏常需实地检查。本研究主要贡献是展示了空中和地面机器人系统的集成,以自动化植物检查过程,提高田间监测效率。本文介绍了一种结合空中和地面机器人系统对农作物进行自动化叶级检测的方法。该研究使用无人机获取正射影像并为地面机器人提供导航图,地面机器人基于Thorvald II平台,集成带五个高清摄像头的机械臂,通过精确位姿估计、路径规划和导航到达目标点后,机械臂进行视角规划和基于图像的重建,最终得到高分辨率叶片模型。此方法可用于长期监测特定植物,了解其疾病或营养缺乏情况,或进行单株尺度的选择性除草,研究由德国研究基金会资助。
 图1 左图:无人机用于在野外创建高分辨率语义正射影像。右:UGV和机器人相机臂设置用于作物检查。
图1 左图:无人机用于在野外创建高分辨率语义正射影像。右:UGV和机器人相机臂设置用于作物检查。
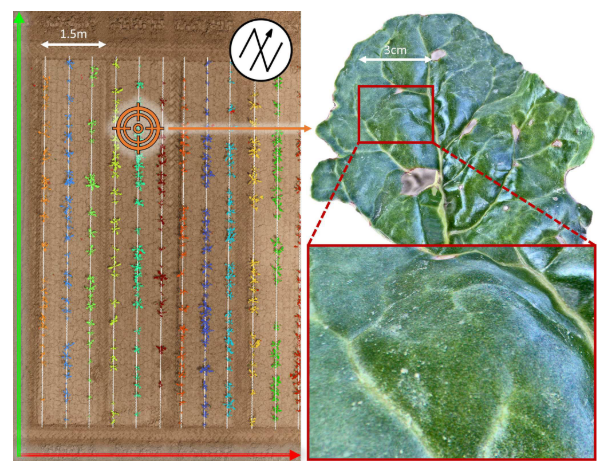 图2 左图:具有提取的作物行的地理参考正射影像和感兴趣的单个甜菜植物的一个示例。右图:用UGV的多相机机械臂创建的单个甜菜叶的彩色高分辨率3D重建。
图2 左图:具有提取的作物行的地理参考正射影像和感兴趣的单个甜菜植物的一个示例。右图:用UGV的多相机机械臂创建的单个甜菜叶的彩色高分辨率3D重建。
Esser, Felix & Marks, Elias & Magistri, Federico & Weyler, Jan & Bultmann, Simon & Zaenker, Tobias & Ahmadi, Alireza & Schreiber, Michael & Kuhlmann, Heiner & Mccool, Chris & Popovic, Marija & Stachniss, Cyrill & Behnke, Sven & Bennewitz, Maren & Klingbeil, Lasse. (2024). Automated Leaf-Level Inspection of Crops in Agricultural Fields by Combining Aerial and Ground Robot Systems.
编辑
栗文静
推荐新闻

视频展示
联系我们
江南平台app体育
地址:北京市海淀区西三旗街道建材城中路12号院8号楼2门
电话:010-62925490、82928854、82928864、82928874、18600875228
传真:010-62925490-802
Email: info@phenotrait.com
邮编:100096
在线留言
关注我们
植物表型圈
植物表型资讯